
Neuronavegación en la cirugía de columna percutánea y el papel de la enfermería
Trabajo presentado al XLV Congreso de la Asociación Española de Enfermería en Neurociencias. Cadiz. Mayo 2023.
Este trabajo se presentó al XLV Congreso de la Asociación Española de Enfermería en Neurociencias que se celebró en Cadiz en mayo del 2023.
Rafael García de Sola
Director de la Cátedra UAM “Innovación en Neurocirugía”
Jefe del Servicio de Neurocirugía
Hospital Ntra. Sra. del Rosario
Madrid

Abstract
Palabras claves
Neuronavegación, Columna, Fijación Pedicular Percutánea y Enfermería.
Introducción- Objetivos
La neuronavegación se ha convertido en el “GPS” que ayuda a mantenerse correctamente situado, desde el punto de vista anatómico, durante todo el acto quirúrgico. Proporcionando, en concreto a la cirugía percutánea de columna, una mayor seguridad y precisión, así como mejorando la técnica quirúrgica.
Con el fin de demostrar la importancia de la labor de Enfermería en estas intervenciones, se ha elaborado una guía para estandarizar el papel de Enfermería en la cirugía de columna percutánea, usando la neuronavegación como método seguro para la colocación de los implantes en tiempo real.
Material y métodos
Se ha llevado a cabo una revisión bibliográfica sobre la literatura existente en distintas bases de datos (PUBMED, CUIDEN, LILACS, IBECS Y SCOPUS). En esta búsqueda realizada desde septiembre del 2022 hasta marzo 2023 inclusive no se encontró ningún artículo relevante ni relacionado con el tema.
Ante la inexistencia de artículos relacionados se procedió a hacer una guía para estandarizar la labor de Enfermería en la cirugía de columna percutánea, con imágenes de fluoroscopia 3D intraoperatoria, realizando una reconstrucción 3D con el neuronavegador.
Se detalla la preparación del material quirúrgico antes de la cirugía, con los cuidados de enfermería necesarios y las actividades de enfermería durante la instrumentación de la cirugía con la descripción de la misma.
Resultados
Elaboración de un protocolo de enfermería para proporcionar los conocimientos necesarios para una adecuada actuación en las cirugías de columna percutánea neuronavegadas. Proporcionando una mayor seguridad y disminución de complicaciones intraoperatorias.
Conclusiones
La cirugía percutánea neuronavegada proporciona una instrumentación enfermera segura y muy precisa, con excepcionales secuelas postquirúrgicas, debido a una mayor disminución de lesión neurológica o vascular, proporcionando una recuperación más rápida del paciente.
Introducción
La neuronavegación es una tecnología novedosa para la realización de cirugías guiadas por imagen, en la que el neurocirujano puede observar en tiempo real la situación del instrumental quirúrgico, así como cada una de sus maniobras sobrepuestas a reconstrucciones tridimensionales de imágenes. La primera cirugía realizada con el apoyo de un equipo de neuronavegación fue practicada en 1986 por Roberts y sus colaboradores, empleando un neuronavegador que sobreponía reconstrucciones tridimensionales de imágenes obtenidas por tomografía computarizada (TAC) preoperatorioas en el campo visual del microscopio, calculando la orientación y posición de este último gracias a un sistema basado en ondas acústicas. (1)
La neuronavegación espinal se introdujo en 1995 con el objetivo de mejorar la precisión en la colocación de los tornillos transpediculares y de esa manera disminuir el porcentaje de lesiones neurovasculares y mejorar el resultado funcional. (2)
El software de navegación guiada por tomografía computarizada se utiliza para proporcionar información tridimensional del campo quirúrgico y de la instrumentación
en tiempo real. Funciona utilizando una tomografía computarizada preoperatoria o intraoperatoria para reconstruir digitalmente un «mapa» anatómico durante la operación. (2,3)
Esto permite identificar la anatomía de la región sometida al procedimiento quirúrgico con relación a los instrumentos quirúrgicos, dando mayor exactitud a la manipulación del instrumento y reduciendo el riesgo de complicaciones. (2)
La neuronavegación se ha convertido en el “GPS” que ayuda a mantenerse correctamente situado, desde el punto de vista anatómico, durante todo el acto quirúrgico. Proporcionando, en concreto a la cirugía de columna percutánea, una mayor seguridad y precisión, así como mejorando la técnica quirúrgica. (4)
Esta tecnología reduce significativamente la exposición a la radiación del personal del quirófano y del paciente. Permite la obtención de imágenes de los pacientes en la posición operativa, elimina el extenso tiempo requerido para el proceso de registro y permite repetir las imágenes de TAC si el paciente se mueve significativamente durante la cirugía (5). También es de destacar la posibilidad de control inmediato postquirúrgico 3D, tras la implantación de los implantes, permitiendo su corrección en caso de malposición.
El éxito de la colocación percutánea de tornillos transpediculares necesita de la habilidad y experiencia quirúrgica, debido a la falta de puntos de referencia en la superficie anatómica vertabrel, por lo cual se requiere una mayor curva de aprendizaje (6). La mala colocación de los tornillos transpediculares puede comportar secuelas neurológicas y funcionales importantes que contribuyen de manera negativa a la morbilidad del paciente (2).
Los sistemas de navegación quirúrgica 3D han demostrado superioridad en la precisión de colocación del tornillo en el pedículo, cuando se compara con el uso de navegación 2D (7) o navegación basada en tomografía computarizada preoperatoria (8).
Objetivos
Objetivo principal
– Elaborar una guía para estandarizar el papel de Enfermería en la cirugía de columna percutánea, usando la neuronavegación como método seguro para la colocación de los implantes en tiempo real.
Objetivos específicos
– Describir la labor de Enfermería como instrumentista en la cirugía de columna percutánea.
– Determinar la utilidad del sistema de neuronavegación en dicha cirugía.
Material y métodos
La correcta preparación del quirófano compete tanto a la enfermera instrumentista como a la circulante. Comprobando que todo el material y el equipo necesario esté dentro del quirófano, preparado para su uso, controlando en todo momento el instrumental y velando por la seguridad del paciente y del campo quirúrgico estéril.
Material y equipo necesario
Equipo de navegación. Como hemos comentado, consiste en un sistema de localización intraoperatoria, guiado por imagen, permitiendo un conocimiento en tiempo real de la localización de los instrumentos quirúrgicos. Se compone de varios elementos (Fig. 1):
- 1. Estación de trabajo. Permite la planificación de la cirugía y el almacenamiento de los datos de la imagen. A través de su pantalla táctil se puede interactuar con el mapa tridimensional de la columna, así como realizar acciones más específicas como fotografías de la planificación o aumento virtual de la prolongación de los instrumentos.
- 2. Cámara de seguimiento. Permite el seguimiento óptico, rastreando la posición y orientación de los instrumentos quirúrgicos. Consiste en dos cámaras unidas entre sí que emiten rayos infrarrojos, que se reflejan en las esferas acopladas a los diferentes instrumentos quirúrgicos. La distancia entre las cámaras y el campo quirúrgico puede variar entre 90 cm. y 200 cm. Esta distancia depende del ángulo de posición de las cámaras, que es variable.
- 3. Software de navegación. Permite la visualización en la estación de trabajo del mapa tridimensional de la columna vertebral del paciente, así como la planificación previa de la cirugía.

Sistema marcador reflectante. Consiste en unas esferas reflectantes que se colocan en todos los instrumentos quirúrgicos que queremos utilizar en la navegación. Su función es reflejar los rayos infrarrojos emitidos por las cámaras. Esto permite que el software pueda localizar dichos instrumentos en el espacio.
Marcador de referencia, denominado comúnmente como “estrella”. Se utiliza para que el sistema de navegación pueda correlacionar la posición de los instrumentos quirúrgicos en relación con el mapa tridimensional de la columna vertebral. Generalmente se fija en la cresta iliaca. Es fundamental que durante todo el proceso quirúrgico permanezca en la misma posición (Fig.2).
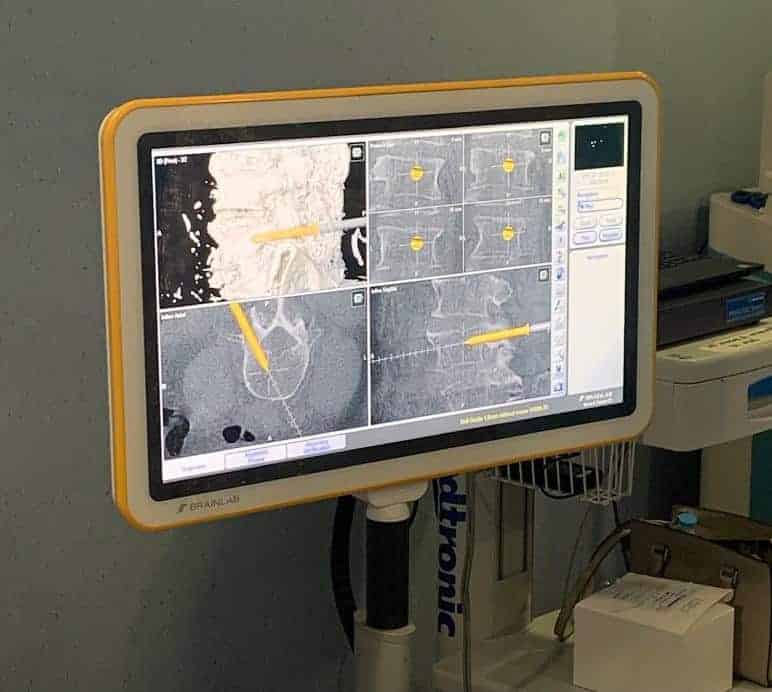
Equipo de Rx que permita visión en 3D. Para complementar la información proporcionada por el sistema de navegación y confirmar la posición de los tornillos (Fig. 3 y 4).


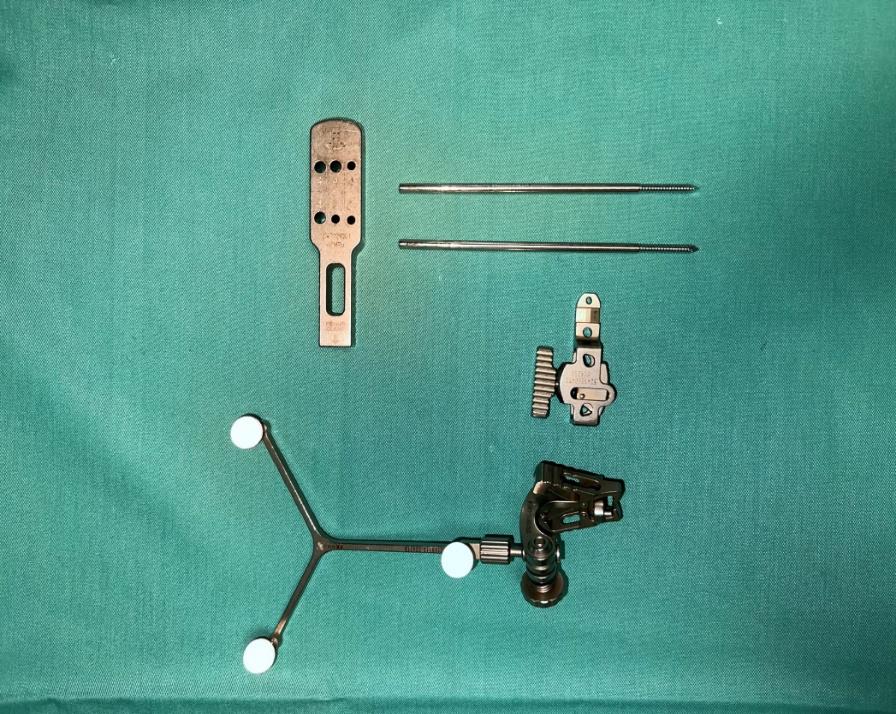
Material estéril para realizar la instrumentación. Son necesarios instrumentos quirúrgicos equipados con marcadores de seguimiento que sean detectados por la cámara de seguimiento. Para mayor precisión, se recomienda que el eje mayor del adaptador se coloque paralelo al eje mayor del instrumento quirúrgico al que se acopla.
- Posicionador de la aguja de Kirschner (Fig.5)

Fig. 5. Posicionados o introductor de la aguja de Kirschner - Calibrador. Se utiliza para garantizar la precisión de la información de los distintos elementos quirúrgicos del sistema de navegación durante la cirugía (Fig. 6).

Fig.6a.- Sistema de calibración de los instrumentos

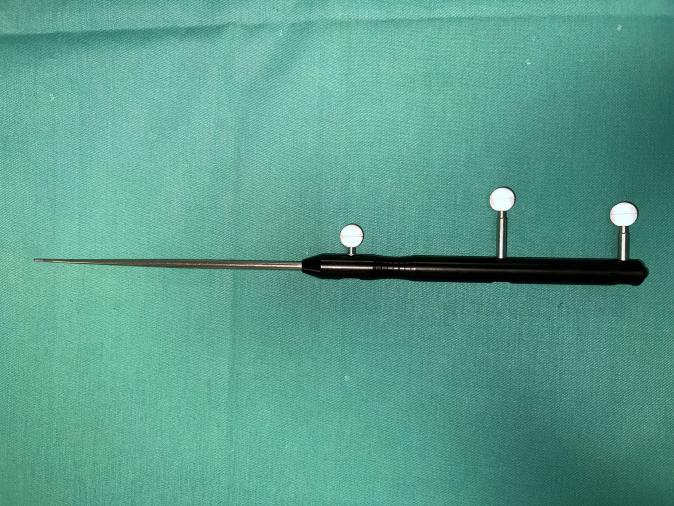
Fig.6b.- Sistema de calibración de los instrumentos - Herramienta de registro. Más conocida como puntero. Se utiliza como primer contacto con la imagen tridimensional del paciente a través de la piel así como control de cualquier paso durante la intervención quirúrgica (Fig 7).

Fig. 7.- Imagen del puntero, con bolas refrongentas, para su identificación en el neuronavegador. - Terraja y destornillador. Se les colocan marcadores de seguimiento (Fig. 9 y 10)

Fig.9.- Terraja y destornillador, equipados con sus “estrellas” de reconocimiento y localización.

Fig.10- Imagen integrada de todo el instrumental necesario para una correcta neuronavegación, cada uno con sus “estrellas”. - Microhemilaminectomía descompresiva.– La cirugía comienza con una pequeña incisión paralela a la línea media, a nivel del segmento patológico, en el lado en que la clínica de radiculalgia es más manifiesta.. Con técnicas mínimamente invasivas, guiados por el puntero del neuronavegador, se coloca un separador, fijado a la mesa de Jackson, para llevar a cabo una micro-hemilaminectomía descompresiva.. Con la ayuda del microscopio quirúrgico, se lleva a cabo una descompresión radicular y se elimina la estenosis del receso lateral y del canal vertebral. Se retira el separador.
- Implantación de tornillos pediculares.– El segundo tiempo quirúrgico consiste en la implantación de los tornillos pediculares. Se realiza igualmente con técnicas mínimamente invasivas, a través de dicha incisión y una nueva contralateral. Todo esto, bajo control de las imágenes del neuronavegador.
Lo primero de todo se calibra el posicionador, la terraja y el destornillador con el tornillo pedicular correspondiente, calculando el grosor y la longitud del implante adecuado, acorde al pedículo del paciente. Es muy importante la correcta colocación de las esferas reflectantes. Deben ser nuevas y estar bien secas. Se recomienda limpiarlas con una gasa seca antes de cada uso, ya que la calibración es un momento crucial y una mala medición supondría una mala referencia en la guía de imágenes (Figs. 13 y 14).
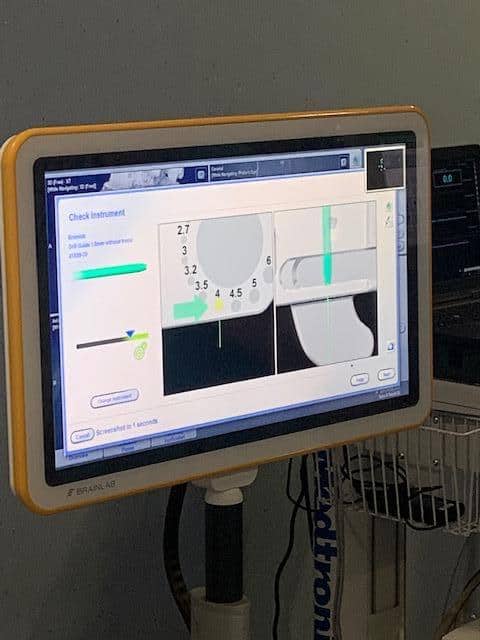
Fig. 13.- Secuencia de calibración del posicionador, terraja y destornillador, con tornillo visto de izquierda a derecha.

Fig. 14.- Visión de la pantalla de estación de trabajo del neuronavegador, durante la calibración. Se continúa con la colocación del posicionador de la aguja de Kirschner, alineado con en el pedículo seleccionado. En este tiempo se está trabajando guiados por la pantalla del neuronavegador, sin visión directa del campo quirúrgico.
Con el martillo se rompe la cortical, se introduce una aguja de Kirschner marcada, que se deja posicionada en el pedículo, para que sirva de guía de los implantes. Para dilatar el canal de implantación del tornillo, se utiliza la terraja correspondiente, siempre alineado con la cámara de seguimiento del neuronavegador.
Previamente se ha marcado la profundidad deseada y, durante la impantación, se sigue la trayectoria del tornillo (Fig. 15). La calibración previa del destornillador y el tornillo permite introducir el implante correspondiente, comprobando en todo momento su trayectoria en la pantalla de la estación de trabajo del neuronavegador (Fig. 16).
Una vez colocados todos los implantes se realiza un TAC intraoperatorio comprobando su correcta posición.
Por último, bajo control de Rx, utilizando el mismo arco, se finaliza el procedimiento tras la colocación de las barras y fijación del sistema.Fig. 15.- Secuencia de colocación de los tornillos pediculares. 
Fig. 16.-Estación de trabajo con imágenes 3D en el momento de introducir el implante pedicular.





Intervención quirúrgica. Al paciente se le coloca en prono, gracias a la mesa de Jackson radiotransparente que nos permite realizar cirugías de columna muy complejas (Fig. 4 y 11).
Antes de comenzar la intervención quirúrgica, la enfermera instrumentista es la responsable de preparar todo el instrumental y el material de la navegación en el campo estéril. Colocando a cada una de las partes de la navegación las esferas reflectantes y montando los marcadores de referencia, tanto en la terraja como en el destornillador y en el sistema de TAC intraoperatorio.

Se comienza colocando la matriz de referencia unida a un fijador de dos pines que se introduce atornillado en la cresta ilíaca del paciente. Una vez colocado se obtienen imágenes con fluoroscopia 3D intraoperatoria realizando una reconstrucción 3D con el neuronavegador (Fig. 12)



Resultados
Elaboración de un protocolo interno de Enfermería para proporcionar los conocimientos necesarios para una adecuada actuación en las cirugías de columna percutánea neuronavegadas, facilitando una mayor seguridad y disminución de complicaciones intraoperatorias.

Conclusiones
La utilización del TAC intraoperatorio junto a un abordaje mínimamente invasivo, permite una instrumentación enfermera segura y precisa de los trastornos complejos de la columna vertebral, con excepcionales secuelas postquirúrgicas y con una consiguiente mayor disminución de lesión neurológica o vascular del paciente.
Con esta técnica tenemos, a tiempo real, una gran información anatómica de la zona a tratar, las incisiones son mínimas y el sangrado es apenas perceptible. Se precisa menos tiempo anestésico y tiempo quirúrgico. El postoperatorio es menos doloroso, siendo la estancia hospitalaria más corta, por lo que recuperación del paciente es más rápida.
Esta técnica reduce notablemente la exposición de radiación al personal del quirófano, del propio paciente y, a su vez, existe la posibilidad de visualizar tridimensionalmente las diferentes estructuras vertebrales y fusionar esta imagen diagnóstica 3D con la realidad anatómica, asegurando la correcta colocación del implante con ínfimo margen de error, evitando dañar estructuras nerviosas, vasculares o viscerales.
Bibliografía
1.Choreño-Parra JA, Carnalla-Cortés M, Flores-Vázquez JC, Ruíz-Rivero CO, Guadarrama-Ortíz P. Neuronavegación: neurocirugía guiada por imagen. Rev Mex Neuroci. 2018; 19 (4): 83(11)
2.Georgy M. Daneri-Allis, Jesús Violante-Mejía, Antonio Villa-Benites, Roberto Anaya- Prado y José D. Zepeda-Ochoa. Instrumentación dorso-lumbar asistida con neuronavegación O-arm y cirugía mínimamente invasiva: resultados clínico- quirúrgicos. Cir. cir. [Internet] 2021; 89 (5): 595(8) Disponible en: https:// www.scielo.org.mx
3.Sielatycki JA, Mitchell K, Leung E, Lehman RA. State of the art review of new technologies in spine deformity surgery-robotics and navigation. Spine Deform. [Internet] 2022 Jan; 10(1): 5-17 Disponible en: https://pubmed.ncbi.nlm.nih.gov/ 34487345/
4.R. García de Sola. Introducción a la neuronavegación. [Internet] 2013 Disponible en: www.neurorgs.net
5.Arbaz A. Momin, Michael P. Steinmetz. Evolution of Minimally Invasive Lumbar Spine Surgery. World Neurosurg. [Internet] 2020; 140:622-626. Disponible en: https:// pubmed.ncbi.nlm.nih.gov/32434014/
6.Calleros-Hernandez NA, Valencia-Martinez G,Hardy-Perez AE, Granados-Agonizante I. Fijación transpedicular percutánea versus técnica abierta en pacientes con fracturas toracolumbares tipo A. Acta ortop. Mex. [Internet] 2019; 33 (4:) 217(8). Disponible en: https://www.scielo.org.mx/
7.Adrian Elmi-Terander, Halldor Skulason, Michael Söderman, John Racadio, Robert Homan, Drazenko Babic, Nijs van der Vaart, and Rami Nachabe. Surgical Navigation Technology Based on Augmented Reality and Integrated 3D Intraoperative Imaging. Spine [Internet] 2016; 41(21): 1303(9) Disponible en: https://www.ncbi.nlm.nih.gov/
8.Adrian Elmi-Terander, Gustav Burström, Rami Nachabe, Halldor Skulason, Kyrre Pedersen, Michael Fagerlund, Fredrik Ståhl, Anastasios Charalampidi, Michael Söderman, Staffan Holmin, Drazenko Babic, Inge Jennisken, Erik Edström, Paul Gerdhem. Pedicle Screw Placement Using Augmented Reality Surgical Navigation With Intraoperative 3D Imaging. Spine [Internet] 2019; 44(7): 517(9) Disponible en: https://pubmed.ncbi.nlm.nih.gov/



