ROBOTIC-ASSISTED SKULL BASE SURGERY
4th Congress Of European ORL-HNS 7-11 Octubre, 2017 Barcelona, Spain
(1)-ENT Department. Hospital Universitario de Torrejón, Madrid, Spain.
(2)-Neurosurgery Department. Hospital N. Sra. Del Rosario, Madrid, Spain.
![]()
We present the advantages and disadvantages of using the robot in the endoscopic transesphenoidal surgery performed in 12 patients.

The multidisciplinary approach to the skull base involves a close collaboration between the otolaryngologist and the neurosurgeon. The nasal endoscopic approach is usually performed in two hands. Neurosurgical time is usually performed in four hands and through both nostrils. When using robotic devices arises the difficulty of combining nasal endoscopic technique with the requirements of the neurosurgical device itself.
The ROSA system allows a two-handed approach of a single neurosurgeon who can simultaneously use a motorized chair.
The positioning of the robot fixed on the head fixation system makes it necessary to determine the height of the surgical table that can not be mobilized during the intervention and a rotation of the head towards the opposite side of the nasal access.
The surgery of each patient was planned preoperatively with the radiological study for the navigator: MRI and CT. The robot was installed coupled to the rigid system of fixation of the head. Benchmarks were recorded for 3D reconstruction of the head that processes the equipment. The endoscope was positioned using ROSA® software during neurosurgical time.
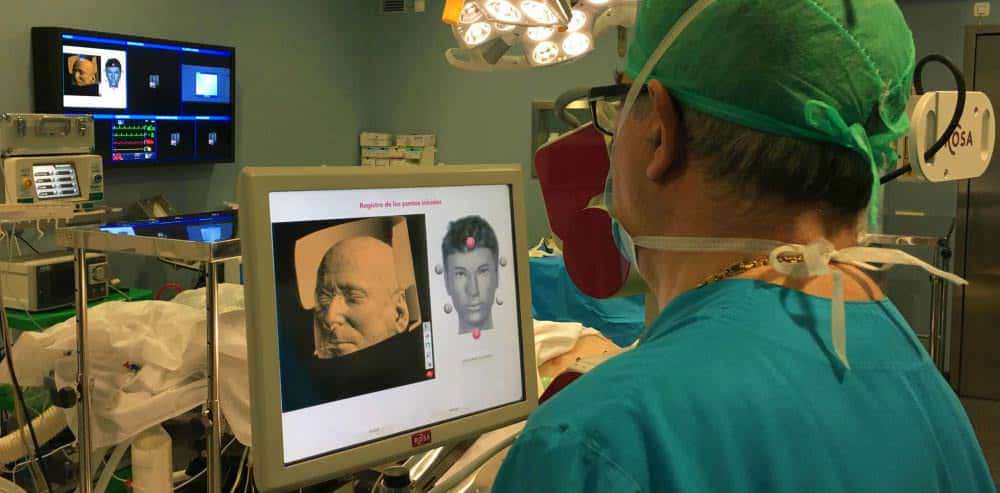
The stabilization of the image is an advantage to be valued in counterpart with the three-dimensional image offered by the natural movement of the endoscope in and out.
The adaptation of endoscopes that allow to select the angulation without the change of endoscope or those with distal flexible tip can be a complement to the surgery with robotic assistant.
BIBLIOGRAPHY
1. Doulgeris JJ, Gonzalez-Blohm SA, Filis AK, Shea TM, Aghayev K, Vrionis FD. Robotics in Neurosurgery: Evolution, Current Challenges, and Compromises. Cancer Control. 2015 Jul;22(3):352-9.
2. Brandmeir NJ, Savaliya S, Rohatgi P, Sather M. The comparative accuracy of the ROSA stereotactic robot across a wide range of clinical applications and registration techniques. J Robot Surg. 2017 May 8.
